 FR
FR EN
ENAnti-collision obstacles (alarmes)
Un point fort du système anti-collision est qu’il fonctionne sur la trajectoire, y compris sur la trajectoire prédictive, en vol dynamique. Toute alarme intempestive est ainsi évitée. En vol tactique, une modification rapide de la trajectoire permet d’annuler instantanément une alarme ; de même, une mise en virage vers un obstacle déclenchera immédiatement une alarme.
Un outil de dessin de modèles en 3D représente les obstacles issus de la base de données obstacles.
Un volume de protection peut être défini (par la fonction réglages) autour de ceux-ci. Lorsque la trajectoire de l’aéronef est sur le point de pénétrer dans ce volume de protection, une alarme sonore et visuelle apparaît. Le temps de vol avant pénétration générant l’alarme est paramétrable.
L’image peut être stabilisée sur la ligne de foi de l’aéronef ou sur sa trajectoire. Ce choix peut être préprogrammé ou modifié à la demande.
Le système se caractérise par quatre modes de fonctionnement :
- Statique
- Navigation
- Obstacle
- Approche
Ces modes se traduisent par une modification sensible du niveau de zoom de l’image.
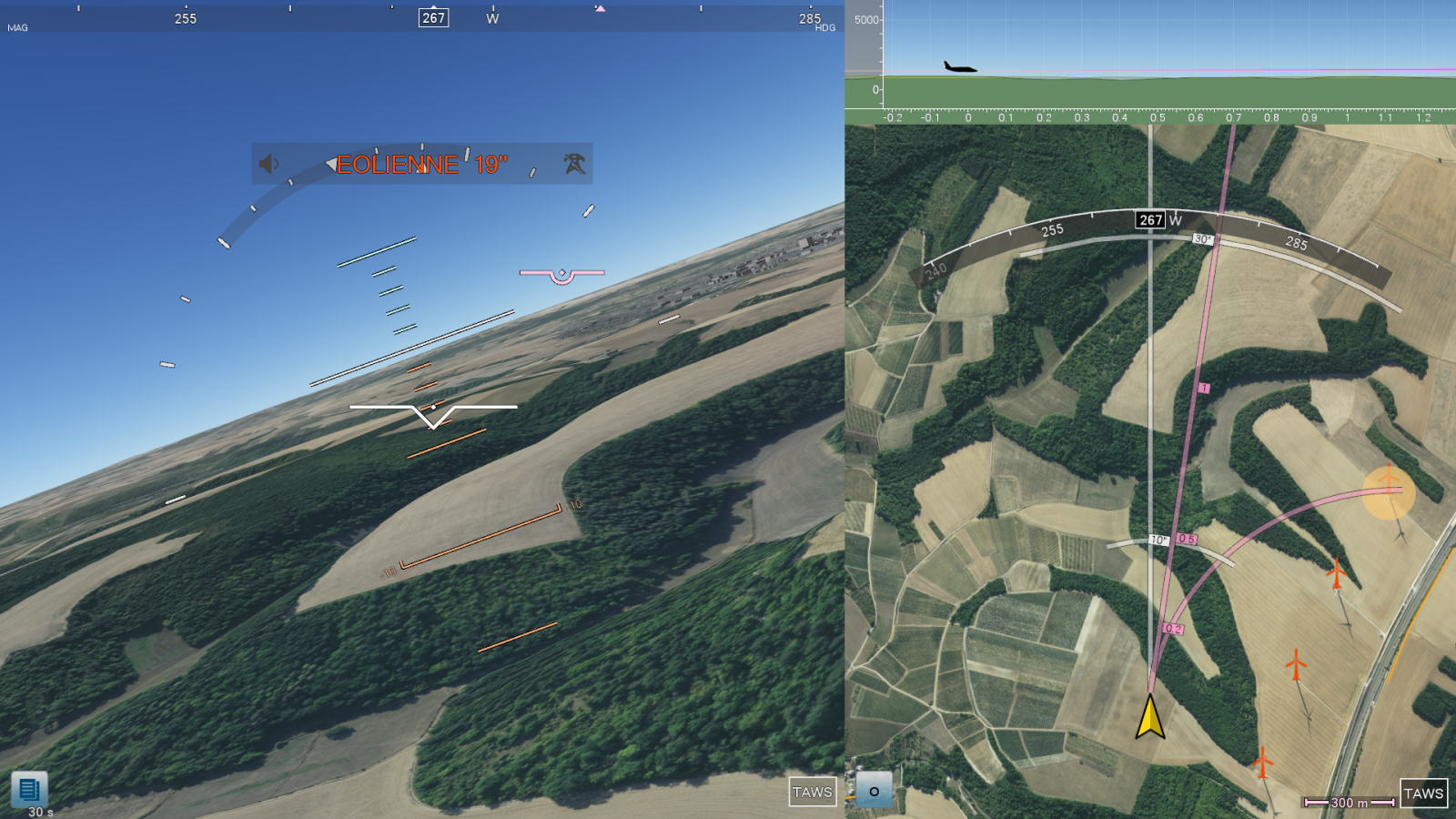
Remarque : En cas d’alarme en mode « Navigation », lorsque l'obstacle est situé au centre dans la vue 3D, le système passera automatique en mode « Obstacle » et augmentera le zoom de l’image. Ceci pour être en accord avec le zoom « physiologique » de l’œil du pilote en situation de recherche dans le paysage de l’obstacle signalé. Si le danger s’avère être sur le côté de la vue 3D ou dans une partie non visible (cas d’un obstacle situé en bout de virage), le zoom de la vue 3D reste inchangé et la vue 2D sera automatiquement affichée avec les données de photographie aérienne.
Lorsqu’une alarme est générée en mode « Statique » (risque de collision obstacle en déplacement latéral), le niveau de zoom reste inchangé. Dans de ce mode « Statique », l’image 3D est toujours calée sur la ligne de foi de l’aéronef (PFD classique).
De même en approche, le pilote se concentrant sur son point d’aboutissement, aura un champ visuel réduit. Le zoom de l’image est adapté à cette phase de vol afin d’obtenir une représentation fidèle à l’écran de ce que le pilote observe à l’extérieur.
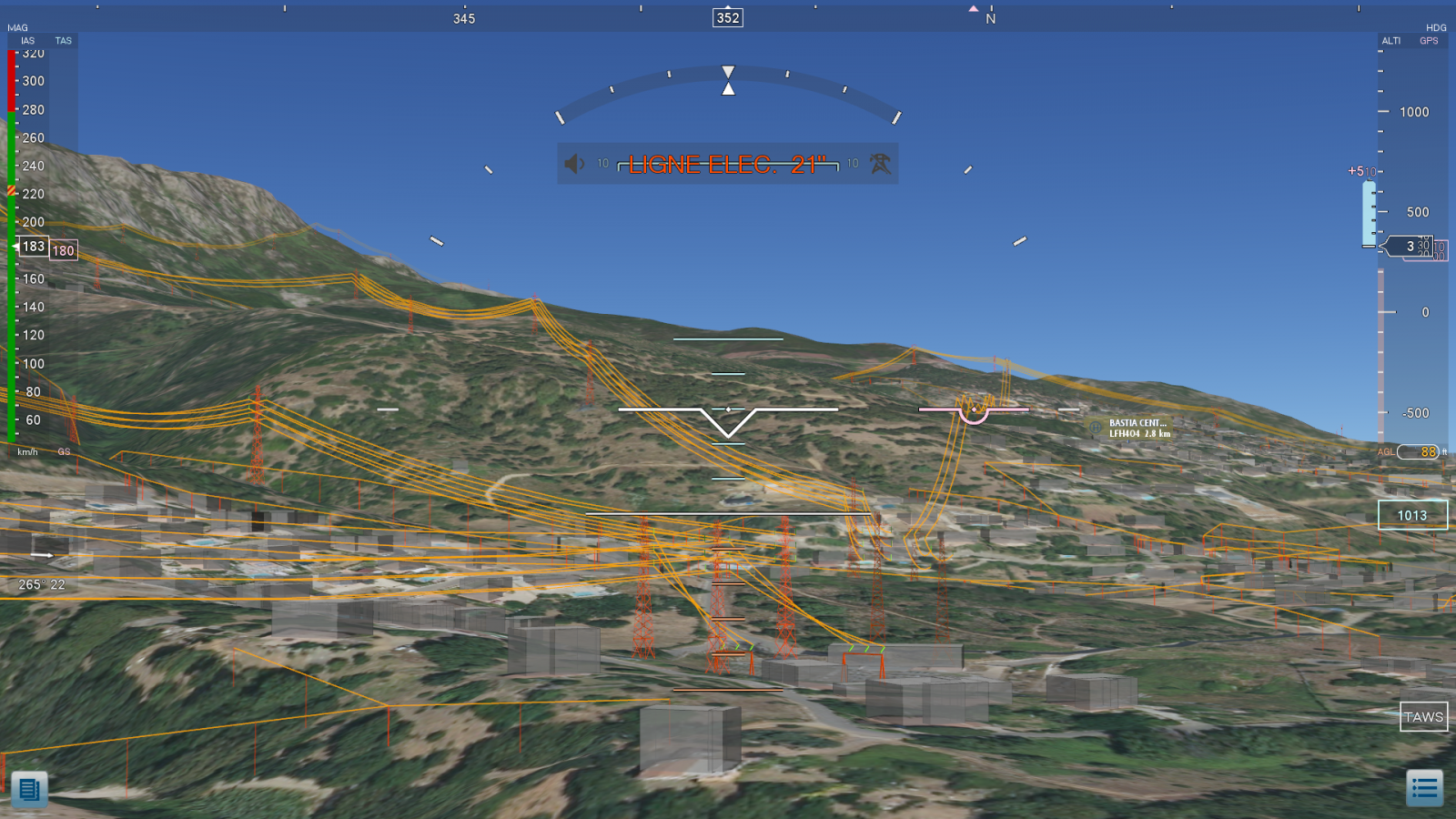
Les alarmes obstacles sont générées dans deux cas :
- lors d'une pénétration de l'aéronef dans le volume de sécurité enveloppant l'obstacle (message texte généré : type d'obstacle suivi d'un point d'exclamation, message audio : bip aiguë à haute fréquence + type d'obstacle + en cas d'obstacle ponctuel, position relative au cap, exprimée en heure).
- en dynamique : en cas d'intersection de la trajectoire prédictive de l'aéronef avec le volume de protection de l'obstacle, et temps avant pénétration du volume inférieur à la limite de temps de sécurité définie dans les réglages. Le Message texte généré est alors : type d'obstacle suivi du temps en secondes avant pénétration du volume de sécurité, message audio : bip grave à basse fréquence + type d'obstacle + gisement de l'obstacle vis à vis du cap, exprimé sur un cadrant horaire : 12h devant, 6h derrière, 3h latéral droit, 9h latéral gauche). Plus l'obstacle se rapproche, plus les bips s'élèvent dans les aiguës et plus leurs fréquences augmentent.
Si plusieurs obstacles sont concernés simultanément par un risque de collision, un seul message texte et audio sera diffusé. La priorité est définie comme telle :
- les alarmes de pénétration de volume seront prioritaires sur les alarmes dynamiques.
- parmi les alarmes de pénétration, la prioritaire sera celle dont la distance est la plus proche entre la position de l'aéronef et le centre de l'obstacle en cas d'obstacle ponctuel ou la proximité de la droite portant un obstacle en cas d'obstacle linéaire.
- parmi les alarmes dynamiques, l'alarme retenue est celle de l'obstacle le plus proche avec l'aéronef.
En cas d'alarme d'un obstacle situé à l'arrière ou sur les côtés par rapport au cap de l'aéronef (ce qui est possible lors d'un vol non symétrique, ou d'un vol vers l'arrière dans le cas d'un hélicoptère par exemple), la carte 2D s'affichera automatiquement avec une échelle automatique.
Tous les obstacles concernés par l'alarme clignotent dans la vue 2D et 3D.
Afin de supprimer le message audio d'une alarme, il faut cliquer dans la vue 3D à droite du message sur le symbole d’obstacle. Une pression sur le symbole « haut-parleur » situé à gauche du message permet d’annuler toutes les alarmes pendant 30 secondes.
A l’unité centrale, il est possible de connecter un conducteur bifilaire pourvu d’un interrupteur à position momentanée. Cet interrupteur permet d’effectuer les deux opérations précédentes sans intervention sur l’écran. Une pression brève annule l’alarme en cours, tandis qu’une pression longue arrête toute alarme pendant 30 secondes.